�\������ģ��܇(ch��)�ױP(p��n)���g(sh��)
����ժҪ������ᘌ�(du��)����܇(ch��)��ِ��ģ��܇(ch��)�ױP(p��n)������܇(ch��)?y��n)�Փ�ĽǶȌ?du��)�D(zhu��n)��݆��λ����(sh��)��܇(ch��)�v�������x��(c��)����ԭ���M(j��n)���˽�B����ͨ�^(gu��)��(du��)�D(zhu��n)��݆��λ����(sh��)����C(j��)�����Լ�ģ��܇(ch��)�D(zhu��n)��(w��n)�B(t��i)�ԵĜy(c��)ԇ���ó����@Щ�{(di��o)������(sh��)֮�g��Ӱ�Ҏ(gu��)�ɣ����Ԟ����P(gu��n)��ِ�(du��)�����㷨�ƶ������慢��(sh��)�O(sh��)���Լ��ױP(p��n)����C(j��)��Ӳ���Y(ji��)��(g��u)�{(di��o)������(y��u)���ȷ����ṩһ���ą�����
�����P(gu��n)�I�~��ǰ݆��λ����C(j��)���D(zhu��n)���D(zhu��n)���돽
��������
�������ď���܇(ch��)?y��n)�Փ�ĽǶȌ?du��)�D(zhu��n)��݆��λ��܇(ch��)�v�������x��(c��)����ԭ�����Խ�B����ᘌ�(du��)��ِ��ģ��܇(ch��)�ױP(p��n)�M(j��n)����һϵ�Мy(c��)ԇ�������D(zhu��n)��݆��λ����(sh��)���x��C(j��)���ܜy(c��)ԇ�Լ�ģ��܇(ch��)�D(zhu��n)��(w��n)�B(t��i)�y(c��)ԇ���ó����@Щ�{(di��o)������(sh��)֮�g��Ӱ�Ҏ(gu��)�ɣ�ϣ���܉�o���P(gu��n)��ِ�(du��)�����㷨�ƶ������慢��(sh��)�O(sh��)���Լ��ױP(p��n)����C(j��)��Ӳ���Y(ji��)��(g��u)�{(di��o)������(y��u)���ȷ����ṩһ���ą�����
������܇(ch��)�ױP(p��n)���P(gu��n)����
�����D(zhu��n)��݆��λ����(sh��)
������(du��)����܇(ch��)���ԣ�Ҫ����܇(ch��)�vֱ��(xi��n)���ķ�(w��n)���ԣ�ʹ֮�D(zhu��n)���Ԅ�(d��ng)�������D(zhu��n)���p�㣬��횴_��܇(ch��)݆��λ����(sh��)���������N(xi��o)��A�����N(xi��o)��(n��i)�A��ǰ݆��A��ǰ݆ǰ����
�������N(xi��o)��A��
�������N(xi��o)��A����܇(ch��)݆ƫ�D(zhu��n)���γ�һ�������أ���K܇(ch��)݆ƫ�D(zhu��n)�����N(xi��o)��A��Խ��܇(ch��)�����ߣ�܇(ch��)݆ƫ�D(zhu��n)���Ԅ�(d��ng)������Խ��(qi��ng)�������������^(gu��)����(hu��)����ǰ݆�����^(gu��)�ͣ�����ǰ݆�[��ʹ�D(zhu��n)����ء�ͨ����A�Ǟ�1�㡫3�㡣
�������N(xi��o)��(n��i)�A��
��������܇(ch��)ǰ�����ϣ����N(xi��o)���(n��i)�Aбһ��(g��)�Ƕȣ����N(xi��o)�S��(xi��n)�c����(xi��n)�g�ĊA�ǷQ(ch��ng)�����N(xi��o)��(n��i)�A�ǡ���(d��ng)��܇(ch��)�D(zhu��n)��݆�����������°l(f��)��ƫ�D(zhu��n)�r(sh��)���������N(xi��o)��(n��i)�A���t܇(ch��)݆�Bͬ����(g��)��܇(ch��)��ǰ������̧��һ���߶ȣ���������ʧ��܇(ch��)݆�͕�(hu��)���������������D�֏�(f��)��ԭ��(l��i)�����gλ�á�ͨ�����N(xi��o)��(n��i)�A�Dz�����8�㡣
����ǰ݆��A��
��������܇(ch��)�ęM��ƽ���(n��i)��ǰ݆����ƽ������Aбһ��(g��)�Ƕȣ��Q(ch��ng)��ǰ݆��A�ǡ�ǰ݆��A��һ�������ʹ܇(ch��)݆�ӽ���ֱ·��L��(d��ng)������(d��ng)�pС�D(zhu��n)��������ʹ��܇(ch��)�D(zhu��n)���p�㣻��һ����p�����S�м����i�o��ĸ���d�ɣ�������ʹ�É���������˰�ȫ�ԡ�һ��ǰ݆��A�Ǟ�1�����ң�����(du��)���и��١����D(zhu��n)��Ҫ���܇(ch��)�v��ǰ݆��A�ǿɜpС������ؓ(f��)ֵ��
����ǰ݆ǰ��
������ҕ܇(ch��)݆����܇(ch��)�ăɂ�(g��)ǰ݆�����D(zhu��n)ƽ�沢����ȫƽ�У���������һЩ�Ƕȣ��@�N�F(xi��n)��Q(ch��ng)��ǰ݆ǰ����܇(ch��)݆ǰ���������ǜp�p��������ǰ݆��A������ɵIJ��������������f(xi��)�{(di��o)�����Cǰ݆����܇(ch��)����НL��(d��ng)���o(w��)����(d��ng)��ǰ݆ǰ��һ���0��12mm�����F(xi��n)����܇(ch��)��ǰ݆��A�dz��F(xi��n)�pС������ؓ(f��)ֵ��څ��(sh��)��ǰ݆ǰ��Ҳ��(y��ng)����(y��ng)�pС����Ҳ��ؓ(f��)ֵ��
��������λ�Ì�(du��)��܇(ch��)���ܵ�Ӱ�
������܇(ch��)���ĵ�λ��ͨ�������ľ�ǰ�S���ľ�(xi��n)��ˮƽ���x�����ľ�ˮƽ·��ĸ߶ȁ�(l��i)��ʾ����ͨ�^(gu��)��(sh��)�(y��n)�������㷨�y(c��)������λ�á�
������(du��)��(d��ng)�����ܵ�Ӱ�
������܇(ch��)��������횝M(m��n)���(q��)��(d��ng)�������l����
��������܇(ch��)���(q��)��(d��ng)����횴��ڵ����¶��������L��(d��ng)�������՚�����֮�Ͷ�������܇(ch��)�(q��)��(d��ng)݆�ĸ��������������c·�渽��ϵ��(sh��)���(q��)��(d��ng)�S���S�����P(gu��n)�����(q��)��(d��ng)�S���S��ȡ�Q�����ĵ�ˮƽλ�ã�������λ�ñ�횱��C�(q��)��(d��ng)݆�܉��ṩ���ĸ��������H�Ĵ˷��濼�]������Խ�����(q��)��(d��ng)�SԽ�á�
������(du��)�Ƅ�(d��ng)���ܵ�Ӱ�
������܇(ch��)�Ƅ�(d��ng)��Ҫ���Ƅ�(d��ng)�p�ٶȴ��Ƅ�(d��ng)���x�̣������õ��Ƅ�(d��ng)����(w��n)���ԣ������װl(f��)��ǰ݆��ʧ�D(zhu��n)��݆��(c��)������ƫ�F(xi��n)���Ƅ�(d��ng)����ķ�(w��n)�����cǰ��݆�ı����������P(gu��n)������������t�c����λ�����P(gu��n)��������λ�ñ��C��܇(ch��)��ͬ������ϵ��(sh��)����ǰ�Ƅ�(d��ng)��ռ��܇(ch��)�Ƅ�(d��ng)���Ƅ�(d��ng)��������b�����ĵ����Sˮƽ���x��������܇(ch��)����·�渽��ϵ��(sh��)�����Ƅ�(d��ng)��(w��n)���Լ��^�ã�������ǰ�ƣ�b�����װl(f��)�����S��(c��)������(du��)������܇(ch��)Σ�U(xi��n)�Դ������ĺ��ƣ�b�pС��ǰ݆�׆�ʧ�D(zhu��n)��������
������(du��)ͨ�^(gu��)�Ե�Ӱ�
������܇(ch��)���^��?j��ng)?c��)��������ټ��D(zhu��n)�����r(sh��)����(hu��)�l(f��)����(c��)��A����������@�NΣ�U(xi��n)�����đ�(y��ng)�ڱ��C�^С�x���g϶��ǰ���±M�����͡�
�����C������������ڼ��b�T���·���(y��ng)�M���ܱ��Cģ��܇(ch��)�����Ĵ�ֱλ�ñM���ĵͣ�ˮƽλ�Ñ�(y��ng)��܇(ch��)�о�(xi��n)�Ͽ������S��
������܇(ch��)��(c��)��
�����鱣�C��܇(ch��)�D(zhu��n)��܇(ch��)݆�o(w��)�M���Ƶ�ֱ��(xi��n)�L��(d��ng)��Ҫ��܇(ch��)݆��A�Ǻ�܇(ch��)݆ǰ�����m��(d��ng)��ϣ���(d��ng)܇(ch��)݆ǰ��ֵ�c܇(ch��)݆��A��ƥ�䲻��(d��ng)�r(sh��)��܇(ch��)݆�Ϳ�����ֱ��(xi��n)����^(gu��)���в������L��(d��ng)���a(ch��n)����(c��)���ƬF(xi��n)���@�N���ƬF(xi��n)���^(gu��)�ڇ�(y��n)�ؕr(sh��)�����Ɖ�܇(ch��)݆�ĸ����l����ʹ��܇(ch��)��ʧ���������������(c��)���֞����N��r��
���������(c��)��
�����S�C(j��)��(c��)��
�����D(zhu��n)���(c��)��
�����Ƅ�(d��ng)��(c��)��
������܇(ch��)���Ƅ�(d��ng)�^(gu��)������ǰ݆�ȱ����ϻ����t�����ܰl(f��)����(c��)����
�������Բ�ȡһЩ�a(b��)����ʩ�pС��(c��)������(du��)�ڶ����(c��)������ǰ݆ǰ���a(ch��n)����Q�(l��i)��(c��)����(l��i)�a(b��)����A�a(ch��n)����W�(l��i)��(c��)���ǻ����ֶΡ�Q�(l��i)��(c��)�������|(zh��)�飺��(c��)����С����ǰ���Ǵ�С����(c��)�������cǰ���Ƿ����෴���c܇(ch��)�v�������P(gu��n)���c·���|(zh��)���o(w��)�P(gu��n)����(du��)���S�C(j��)��(c��)������Ҫ�Ǐĸ�׃��(d��)���ҼܽY(ji��)��(g��u)���֣��籾܇(ch��)ģ���p�M��ʽ��(d��)���Ҽ�܇(ch��)��܇(ch��)݆���S�C(j��)��(c��)���������B�U�C(j��)��(g��u)�C����Փ��׃���M�۵��L(zh��ng)�ȣ�ʹģ������^(gu��)����݆��׃�����Ķ��pС�S�C(j��)��(c��)������(du��)���D(zhu��n)���(c��)������Ҫ���x����m�����N(xi��o)�Ƕȣ������������N(xi��o)��(n��i)�A�c��A�ǣ��M����ʹ�D(zhu��n)���(n��i)݆�a(ch��n)����A��������A��ʹ�D(zhu��n)����݆�a(ch��n)����(n��i)�A��pС��A��
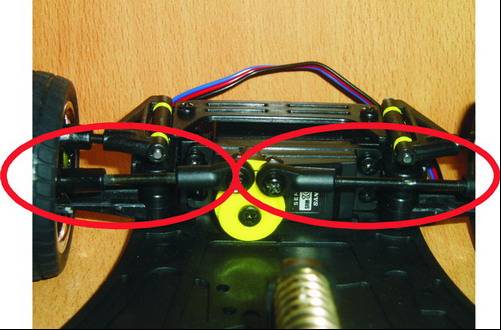
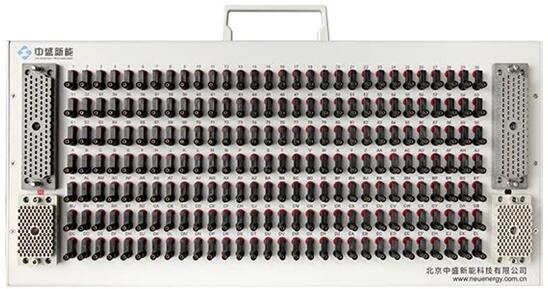
����ģ��܇(ch��)�ױP(p��n)����
����ģ��܇(ch��)�ױP(p��n)���õ��ǵ��L(zh��ng)�p�M��ʽ��(d��)���Ҽܣ���D1������(d��ng)܇(ch��)݆��������(d��ng)�r(sh��)��܇(ch��)݆ƽ��](m��i)�ЃAб����݆����(hu��)�l(f��)���^��׃������܇(ch��)݆�l(f��)����(c��)���ƵĿ������^��܇(ch��)����6̎����(sh��)���{(di��o)���������N(xi��o)��(n��i)�A�nj�(du��)ģ��܇(ch��)����Ӱ푲����O(sh��)�顣
�����D1ǰ݆ǰ���{(di��o)��
�������N(xi��o)��A��
��������ͨ�^(gu��)���Ӊ|Ƭ�Ĕ�(sh��)����(l��i)�������N(xi��o)��A�ǣ�����4Ƭ�|Ƭ��ǰ2��2����A�Ǟ�0��ǰ1��3����A�Ǟ飻ǰ0��4����A�Ǟ顣
������(du��)�ڱ�ģ��܇(ch��)������ʹ֮�D(zhu��n)���`����N(xi��o)��A�ǿ��x��������������أ��t��A�ǿ��x��
����ǰ݆��A��
�����cģ��܇(ch��)�Ă�(c��)���P(gu��n)ϵ�^�����cǰ݆ǰ����ƥ�䣬���O(sh��)�顣
����ǰ݆ǰ��
����ǰ݆���ɶ�C(j��)����(d��ng)���ҙM���U��(sh��)�F(xi��n)�D(zhu��n)��ġ����N(xi��o)�ڴ�ֱ�����λ�ô_����׃���ҙM���U���L(zh��ng)�ȼ��ɸ�׃ǰ݆ǰ���Ĵ�С����U�̣����{(di��o)������10.8mm��18.1mm���җU�L(zh��ng)�����{(di��o)������29.2mm��37.6mm����D1�tȦ��ʾ����
�����ױP(p��n)�x���g϶
�����ڪ�(d��)���Ҽ��[���c�װ�֮�g����ͨ�^(gu��)���p�|Ƭ��(l��i)�{(di��o)���ױP(p��n)ǰ�벿�ֵ��x���g϶���|Ƭ��1mm��2mm�ɷNҎ(gu��)��һƬ�|Ƭ���ӣ�܇(ch��)ǰ���x���g϶��9mm�����x���g϶���{(di��o)��������9mm��12mm�������еĽ�(j��ng)�(y��n)��(l��i)�����ڼ��b�˂�����֮�˾��x�^(gu��)С����(hu��)����ģ��܇(ch��)���r(sh��)��ͨ�^(gu��)�ȣ��^(gu��)�t��(hu��)Ӱ푂��������`���ȡ�
������Ғ�v��p�������A(y��)�o��
�����ڈD2�tȦ̎���Ӊ|Ƭ�������ɵ��A(y��)�o����

�����D2�Ғ��A(y��)�o���{(di��o)��
������C(j��)���ܜy(c��)ԇ
�����ڶ�C(j��)���S���B��һ��(g��)׃������ԓ׃����������(g��)���^���ɂ�(c��)�Ľ��^һ�˽���5V�Դ�ϣ���һ�˽ӵأ����g�Ľ��^�B��ʾ�����ϣ�ʾ�����y(c��)늉�����(d��ng)��C(j��)����(d��ng)ǰ݆�D(zhu��n)��(d��ng)�r(sh��)��׃��������ֵ�S֮��׃��ʾ������늉�ֵҲ�l(f��)��׃��������늉��c��C(j��)���D(zhu��n)�nj�(du��)��(y��ng)����(l��i)���@�ӣ�ͨ�^(gu��)�y(c��)��늉��S�r(sh��)�g��׃������֪��C(j��)�D(zhu��n)�ǵ�׃���ʡ���ԇ�(y��n)�п�֪����C(j��)���Ƅ��ٵ���һ��(c��)�^���D(zhu��n)���D(zhu��n)����һ��(c��)�^���D(zhu��n)�ǡ��Y(ji��)�ό�(du��)ǰ݆�^���D(zhu��n)�ǵĜy(c��)�����ɹ��y(c��)����C(j��)���D(zhu��n)�ټs��2.42rad/s-2.52rad/s������܇(ch��)?y��n)�Փ�����P(gu��n)֪�R(sh��)��֪��ԓ��C(j��)����ƫܛ����ͨ�^(gu��)����ǰ݆ǰ����(l��i)�M(j��n)���{(di��o)����
������(du��)��C(j��)���ܵĜy(c��)ԇ��Ҫ�����O(sh��)�����慢��(sh��)��ͬ�r(sh��)������Ķ�C(j��)�D(zhu��n)��Ҳ��(du��)��������(y��ng)�ٶȺ��D(zhu��n)��r(sh��)��܇(ch��)��������һ���ą������x��
����ģ��܇(ch��)��(w��n)�B(t��i)�D(zhu��n)��y(c��)ԇ
��������(ji��)̽ӑ��C(j��)PWMռ�ձ��c܇(ch��)�١��D(zhu��n)���돽֮�g���P(gu��n)ϵ��ԇ�(y��n)�ж�C(j��)PWMռ�ձ��O(sh��)��6�����քe��1��2��3��4��5��6��ʾ����(sh��)��Խ���D(zhu��n)��Խ����D1���C(j��)�D(zhu��n)�Ǟ��λ1�r(sh��)��܇(ch��)�١����D(zhu��n)���돽��(du��)��(y��ng)�D����ԇ�(y��n)��֪������ͬ�D(zhu��n)���£��D(zhu��n)���돽�c܇(ch��)�ٴ��³ʾ�(xi��n)���P(gu��n)ϵ��
��������(j��)ģ��܇(ch��)�����P(gu��n)��(sh��)��(j��)����ʽ�������Փ�D(zhu��n)���돽��275mm��ԓֵ�cģ��܇(ch��)ԇ�(y��n)��0.31m/s�r(sh��)���D(zhu��n)���돽�������(d��ng)ģ��܇(ch��)܇(ch��)��>1.4m/s���_(k��i)ʼ���F(xi��n)��(c��)���F(xi��n)��
�����Y(ji��)�Z(y��)
��������ͨ�^(gu��)��Փ������ԇ�(y��n)�y(c��)ԇ����(du��)����܇(ch��)��ِ��ģ��܇(ch��)���D(zhu��n)��݆��λ����(sh��)�{(di��o)�������c(di��n)���x��(c��)���Ŀ��ơ��ױP(p��n)�߶ȵ��{(di��o)������C(j��)���D(zhu��n)�����ܼ��D(zhu��n)��(w��n)�����M(j��n)���˷������o����ģ��܇(ch��)���P(gu��n)����(sh��)���{(di��o)�����h����������ģ��܇(ch��)�P(gu��n)���D(zhu��n)��ą���(sh��)���Ӱ푵ģ���˱��Ľo���ăH�Ǹ�����(sh��)���{(di��o)��څ��(sh��)���^��ƥ��ֵ߀�����(j��)ِ���{(di��o)ԇ�@�á�
���P(gu��n)��x:
- ...�� ��о��(chu��ng)�����ø�Уδ��(l��i)��܇(ch��)�˙C(j��)�����O(sh��)Ӌ(j��)��ِ��(b��o)����ʽ����(d��ng)
- ...�� ̽�صڶ����l(w��i)�{(l��n)ɽ������(chu��ng)�¡�������ԇ�(y��n)���g(sh��)Փ����
- ...�� ��2018�Ї�(gu��)�댧(d��o)�w���B(t��i)朴��(hu��)���ڽ��Kʡ�����e��
- ...�� �����}��Ҏ(gu��)����CITE 2019�t���ǻ�δ��(l��i)
- ...�� ����܇(ch��)�����S(ch��ng)��TI���ײ������������ڄ�(chu��ng)������ܵ�����
- ...�� �ⷨ�댧(d��o)�w��ST����Cinemo��Valens��CES 2018չ��(li��n)����ʾ��܇(ch��)��Ϣ�ʘ�(l��)��Q����
- ...�� ���������·�a(ch��n)�I(y��)��(chu��ng)�°l(f��)չ�߷�Փ�������ھ����_(k��i)
- ...�� ����늙C(j��)��(qi��ng)��(sh��)����PCIM����2017չ
- ...�� GPGPU��(gu��)�a(ch��n)������Ї�(gu��)оƬ�a(ch��n)�I(y��)�Ŀհ؎�
- ...�� ��(li��n)�W(w��ng)�a(ch��n)Ʒ�O(sh��)Ӌ(j��)��Wi-Fi�B�ӵ��Ă�(g��)�P(gu��n)�I����
- ...�� �������Ї�(gu��)MEMS���܂������a(ch��n)�I(y��)�l(f��)չ���(hu��)�����ڰ������_(k��i)�Ļ
- ...�� IAIC��(zhu��n)�(xi��ng)ِ���[���Ї�(gu��)о����(y��ng)�Ä�(chu��ng)�£���Ϣ��ȫ�߷�Փ����������
- ...�� ���ܿ�����Դ�Qλ����
- ...�� ���x5G���ײ�OTA �y(c��)ԇ���g(sh��)
- ...�� ����(g��)�Ј�(ch��ng)�������L(zh��ng)�Ƅ�(d��ng)Molex�ӏ�(qi��ng)��܇(ch��)�I(l��ng)��İl(f��)չ
- ...�� �Ї�(gu��)�Gɫ����(li��n)�˳������(hu��)���_(k��i)�ڼ� ���a(ch��n)�W(xu��)���ù�̽�Gɫ�l(f��)չ��ģʽ
- ...�� Efinix® ȫ���(q��)��(d��ng)AI߅��Ӌ(j��)�㣬�ɹ��Ƴ�Trion™ T20 FPGA��Ʒ, ͬ�r(sh��)���a(ch��n)Ʒ�U(ku��)չ����ʮ�f(w��n)߉��Ԫ��T200 FPGA
- ...�� Ӣ�w�������M(j��n)����(hu��)�����I(l��ng)�ǻ�������
- ...�� ��늮a(ch��n)Ʒ�_(k��i)�l(f��)���y(c��)ԇ��ӑ��(hu��)��������Դ��(zhu��n)��(ch��ng)�ɹ��e��
- ...�� Manz���ǿƼ�����댧(d��o)�w�I(l��ng)�� ����弉(j��)�ȳ��ͷ��b�ṩ���W(xu��)���Ƴ̡�Ϳ�������⑪(y��ng)�õ����a(ch��n)�O(sh��)���Q����
- ...�� ������ABITRODE��(d��ng)��늳y(c��)ԇϵ�y(t��ng)���������������Դ
- ...�� ������AFTFϵ��늳y(c��)ԇϵ�y(t��ng)�И�(bi��o)��������Դ��܇(ch��)�ɷ�����˾
- ...�� ������A���ʸ߉���Դ����ʽؓ(f��)�dϵ�y(t��ng)�ɹ����������؈
- ...�� ������A��(gu��)�H��늄�(d��ng)��܇(ch��)���P(gu��n)�I�����y(c��)�u(p��ng)��ӑ��(hu��)�����[���M(j��n)�y(c��)�u(p��ng)���g(sh��)


- ...�� ��(sh��)��(j��)�ɼ��K��ϵ�y(t��ng)�O(sh��)��
- ...�� ��(ji��n)�x�Ƽ�̤��������
- ...�� ���`˼® ���� AEC-Q100 �Y�|(zh��)�J(r��n)�C����܇(ch��)ϵ�Юa(ch��n)ƷӋ(j��)��
- ...�� ���`˼® �����U(ku��)������� ⁽�ϵ��™ FPGA �a(ch��n)Ʒ ⁽�ϵ�Юa(ch��n)Ʒ�U(ku��)�������� 1M ߉��Ԫ�� FPGA
- ...�� ���`˼® ����Trion® Titanium ���_(t��i)�e� (TSMC) 16�{��ˇ��(ji��)�c(di��n)��Ƭ
- ...�� TI��2019��ȫ��(gu��)��W(xu��)������O(sh��)Ӌ(j��)��(j��ng)ِ�C��(ji��ng)��Y�ھ��e��
- ...�� BlackBerry QNX̓�M�C(j��)�@��ȫ���ׂ�(g��)��܇(ch��)��ȫ�����Եȼ�(j��)(ASIL) ��D���J(r��n)�C
- ...�� ���R��܇(ch��)�x��BlackBerry������һ����܇(ch��)
- ...���D��Ԕ����܇(ch��)�x���屳���܇(ch��)Ҏ(gu��)��(j��)��ȫ�O(sh��)Ӌ(j��)Ҫ��
- ...��ʹ���а�ȫ���ϵ��W��惦(ch��)��(g��u)����ȫ����܇(ch��)ϵ�y(t��ng)
- ...������ƫ�ò�־�(xi��n)�Ԃ��������^���M(j��n)չ�͑�(y��ng)��
- ...�����¿�˹�y(c��)�u(p��ng)ijƷ�����ܲ����������C(j��)����ƪ
- ...������(xi��n)���ʽ�ضșz�y(c��)���y(c��)��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�(�m(x��))
- ...������(xi��n)���ʽ�ضșz�y(c��)���y(c��)��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�
- ...��RTD�y(c��)��ϵ�y(t��ng)�Є�(l��)�����ʧ���Ӱ�
- ...���{(l��n)��BR/EDR �� Bluetooth Smart��ʮ����Ҫ�^(q��)�e
- ...��IoT�W(w��ng)�P(gu��n)ƽ�_(t��i)�c��(y��ng)��
- ...������(qi��ng)��ARM DesignStart��ͨ���ƻ�SoC���^�졢�^���L(f��ng)�U(xi��n)֮·
- ...����(sh��)�w�����D(zhu��n)��O2O���}(c��ng)��(ch��)���������ܻ�ˮƽ�ĺ�������
- ...���N܇(ch��)��LED�(q��)��(d��ng)�����ı��^
- ...���{(l��n)���䌦(du��)�ڶ�ƪ��������ɷ���
- ...��������A�Ƴ��I(l��ng)�ȵğo(w��)��(xi��n)��(sh��)��(j��)�ɼ���Q����
- ...����ɭ���댧(d��o)�w����Ј�(ch��ng)څ��(sh��)�ğo(w��)��(xi��n)��늷���
- ...����ɭ���댧(d��o)�w�����܇(ch��)�����O(sh��)Ӌ(j��)څ��(sh��)�Ľ�Q����